To continue NPP training series here is my next topic: How does it work – CVM – Software Defined
If you missed other parts of my series, check out links below:
Part 1 – NPP Training series – Nutanix Terminology
Part 2 – NPP Training series – Nutanix Terminology
Cluster Architecture with Hyper-V
Data Structure on Nutanix with Hyper-V
I/O Path Overview
Drive Breakdown
To give credit, most of the content was taken from Steve Poitras’s “Nutanix Bible” blog as his content is the most accurate and then I put a Hyper-V lean to it. Also, he just rocks…other than being a Sea Hawks Fan :).
Software-Defined

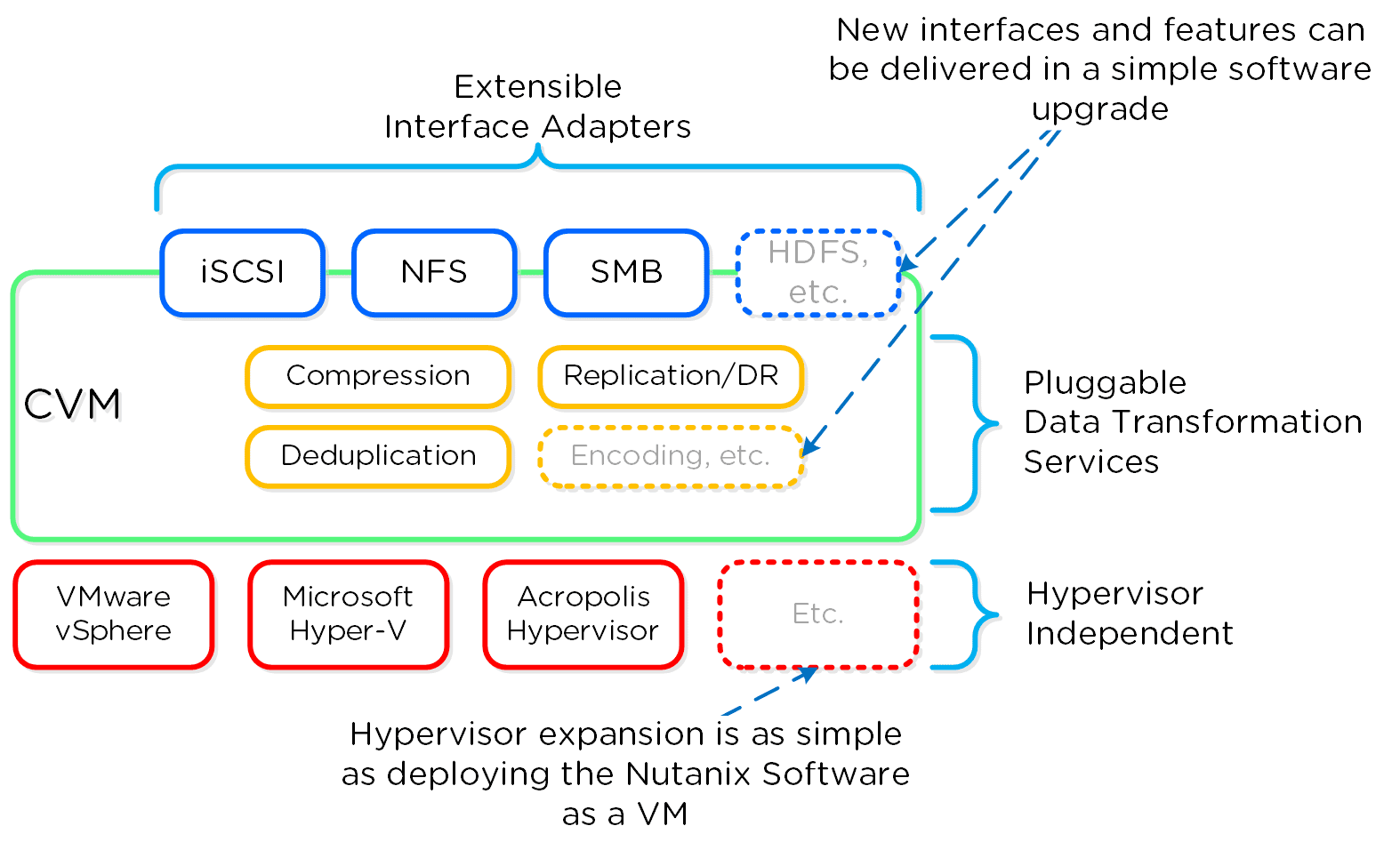
As mentioned before (likely numerous times), the Nutanix platform is a software-based solution which ships as a bundled software + hardware appliance. The controller VM or what we call the Nutanix CVM is where the vast majority of the Nutanix software and logic sits and was designed from the beginning to be an extensible and pluggable architecture. A key benefit to being software-defined and not relying upon any hardware offloads or constructs is around extensibility. As with any product life-cycle, advancements and new features will always be introduced.
By not relying on any custom ASIC/FPGA or hardware capabilities, Nutanix can develop and deploy these new features through a simple software update. This means that the deployment of a new feature (e.g., deduplication) can be deployed by upgrading the current version of the Nutanix software. This also allows newer generation features to be deployed on legacy hardware models. For example, say you’re running a workload running an older version of Nutanix software on a prior generation hardware platform (e.g., 2400). The running software version doesn’t provide deduplication capabilities which your workload could benefit greatly from. To get these features, you perform a rolling upgrade of the Nutanix software version while the workload is running, and you now have deduplication. It’s really that easy.
Similar to features, the ability to create new “adapters” or interfaces into Distributed Storage Fabric is another key capability. When the product first shipped, it solely supported iSCSI for I/O from the hypervisor, this has now grown to include NFS and SMB for Hyper-V. In the future, there is the ability to create new adapters for various workloads and hypervisors (HDFS, etc.).
And again, all of this can be deployed via a software update. This is contrary to most legacy infrastructures, where a hardware upgrade or software purchase is normally required to get the “latest and greatest” features. With Nutanix, it’s different. Since all features are deployed in software, they can run on any hardware platform, any hypervisor, and be deployed through simple software upgrades.
The following figure shows a logical representation of what this software-defined controller framework (Nutanix CVM) looks like: Next up, NPP Training Series – How does it all work – Disk Balancing
Next up, NPP Training Series – How does it all work – Disk Balancing
Until next time, Rob…