
Estimated reading time: 3 minutes
 Thank you for reading this post, don't forget to subscribe! Happy New Year 2024!
Thank you for reading this post, don't forget to subscribe! Happy New Year 2024!
 Storage Spaces Direct Basics
Storage Spaces Direct Basics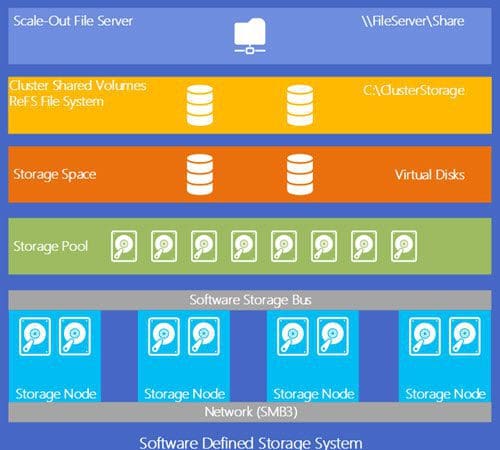 Like anything else, I’m going to start with the basics of the stack and then dive into details of each component over the next few blog posts. There’s a lot to digest…So let’s get rolling…
Like anything else, I’m going to start with the basics of the stack and then dive into details of each component over the next few blog posts. There’s a lot to digest…So let’s get rolling…
As mentioned in my previous post, S2D can be deployed in either a more traditional disaggregated compute model or as a Hyperconverged model as shown below:

Here are the basic components of the stack…
Failover Clustering – The built-in clustering feature of Windows Server is used to connect the servers.
Software Storage Bus – The Software Storage Bus is new in S2D. The bus spans the cluster and establishes a software-defined storage fabric where all the servers can see all of each other’s local drives.
Storage Bus Layer Cache – The Software Storage Bus dynamically binds the fastest drives present (typically SSDs) to slower HDDs to provide server-side read/write caching. The cache is independent of pools and vDisks, always-on, and requires no configuration.
Storage Pool – When an IT Admin enables storage spaces, all of the eligible drives (excludes boot drives, etc.) discovered by the storage bus. Disks are grouped together to form a pool. It’s created automatically on setup, and by default, there is only one pool per cluster. IT Admin’s can configure additional pools, but Microsoft recommends against it.
Storage Spaces – From the pool, Microsoft’s carves out ‘storage spaces’ or essentially virtual disks. The vDisks can be defined as a simple space (no protection), mirrored space (distributed 2-way or 3-way mirroring), or a parity space (distributed erasure coding). You can think of it as distributed, software-defined RAID using the drives in the pool. IT Admin’s can choose to use the new ReFS file system (more on this later) or traditional NTFS.
Resilient File System (ReFS) – ReFS is the purpose-built filesystem for virtualization. This includes dramatic accelerations for .vhdx file operations such as creation, expansion, and checkpoint merging. It also has built-in checksums to detect and correct bit errors. ReFS also introduces real-time tiers. This allows the rotation data between so-called “hot” and “cold” storage tiers in real-time based on usage.
Cluster Shared Volumes – Each vDisk is a cluster shared volume that exists within a single namespace so that every volume appears to each host server as being mounted locally.
Scale-Out File Server – The scale-out file server only exists in converged deployments and provides remote file access via SMB3.
Networking Hardware – Storage Spaces Direct uses SMB3, including SMB Direct and SMB Multichannel, over Ethernet to communicate between servers. Microsoft strongly recommends 10+ GbE with remote-direct memory access (RDMA). IT Admin’s can either use iWARP or RoCE (RDMA over Converged Ethernet).
In Windows Server 2016, Microsoft has also incorporated Storage Replica, Storage QoS, and a new Health Service. I’ll cover each of these areas in a little more detail in a later post with regards to S2D.

 Storage Hardware
Storage Hardware
Microsoft supports hybrid or all-flash configurations. Each server must have at least 2 SSDs and 4 additional drives. Microsoft has support for NVMe in the product today. IT Admin’s can use a mixture of NVME, SSD, or HDDs in a variety of tiering models. The SATA and SAS devices should be behind a host-bus adapter (HBA) and SAS expander.


Now that we have covered the basics, next I will dive into how each of the components work. Next up, ReFS, Multi-Tier Volumes, Erasure Coding and tigers oh my… 🙂
Until next time, Rob…